ОБЗОР
Система зажигания
В течение длительного времени в автомобилях господствовало механическое зажигание горючей смеси. В электромеханических системах зажигания используется прерыватель-распределитель с механическими контактами, который вращается синхронно с коленчатым валом, замыкая контакты прерывателя и посылая ток в первичную обмотку катушки зажигания, а ротор направляет высокое напряжение с вторичной обмотки катушки на свечу соответствующего цилиндра. Слабое место этой системы - контакты прерывателя, через которые проходит ток большой силы.
Прогресс в области микроэлектроники позволил создать электронную систему зажигания, в которой катушки зажигания управляются микропроцессором. Блок управления по сигналам датчиков определяет момент зажигания и выдает управляющие импульсы на модуль зажигания. Здесь нет каких-либо подвижных деталей и поэтому не требуется обслуживания и регулировок при эксплуатации.
В такой системе, вообще говоря, число катушек должно быть равно числу цилиндров в двигателе. Однако в дешевых системах, в целях экономии, одна катушка обслуживает два цилиндра.
В наиболее продвинутых системах напряжение бортовой сети предварительно преобразуется в стабилизированное высокое напряжение (порядка 400 В), которое и подается в первичную обмотку катушки. Это позволяет использовать катушки значительно меньших размеров.
Избавляемся от жгутов
Широкое внедрение электроники приводит к резкому усложнению электропроводки, в результате автомобиль стал буквально опутан толстыми жгутами проводов. Чтобы избавиться от них, были разработаны шины и протоколы для соединения различных устройств, по которым ими можно управлять. Теперь ко всем устройствам подходит один привод питания и шина управления. Первоначально многие промышленные группы предлагали свои собственные стандарты шин, но к настоящему времени определились лидеры. Это следующие шины и протоколы:
- CAN (Controller Area Network) классов А, В и С;
- J1850: стандарт SAE, 2 варианта, классов А и В;
- в разработке находится шина ITS.
Стандартом J2057 определены три класса коммуникационных сетей для передвижных объектов: А, В и С.
Сеть класса А применяется при передаче данных со скоростями от 1 до 10 кбит/с. Типичным применением этой сети является связь с оператором или управление объектами, которые не требуют высокой скорости передачи данных.
Сеть класса В удовлетворяет всем требованиям сети класса А, но обеспечивает скорость передачи данных от 10 до 125 кбит/с и может использоваться для обмена данными состояния и диагностическими данными между блоком управления двигателем, системой управления скоростью движения и системой управления трансмиссией.
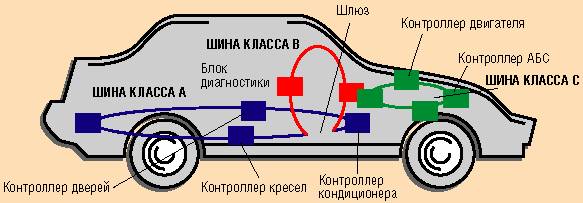
Рис. 4. Применение сетей различных классов в автомобиле
Сеть класса С применяется при передаче данных в реальном масштабе времени и может обеспечивать передачу данных со скоростями от 125 кбит/с до 1 Мбит/с. Связь между системами управления двигателем и активной подвески требует высокой скорости передачи данных и низкого уровня ошибок.
Наибольшее распространение получила шина CAN, разработанная фирмами Bosch и Motorola (см. PC Week/RE, N 9/2000, с. 27).
Сеть и стандарт CAN
Функционирование сети определяется стандартом ISO 11898. В этой сети данные, которые передаются между узлами, не содержат адресов источника и приемника, а только тип данных, содержащихся в сообщении (угловое положение коленчатого вала, температура охлаждающей жидкости и т. п.), который задается уникальным идентификатором, представляющим собой целое 11- или 29-разрядное двоичное число. Теоретически число узлов в сети ограничено только этими числами, однако возможности драйверов контроллеров, выпускаемых в настоящее время, позволяют строить сети с числом узлов до 64.
Скорость передачи данных зависит от длины шины и задержек, определяемых трансиверами. По стандарту ISO 11898 скорость передачи данных в 1 Мбит/с должна обеспечиваться при максимальной длине шины 40 м. При увеличении длины падает скорость передачи. При скорости 500 кбит/с максимальная длина - 100 м, при 250 кбит/с - 200 м и при 125 кбит/с - 500 м.
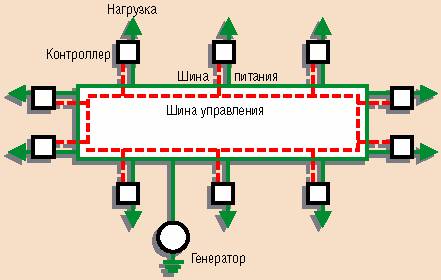
Рис. 5. Управление потребителями в перспективном автомобиле
Все устройства в узлах сети получают сообщение и по идентификатору определяют, кому из них послано это сообщение, и обрабатывают его. Идентификатор задает еще и приоритет сообщения. Чем меньше численное значение идентификатора, тем ниже его приоритет. Сообщение с наивысшим приоритетом получает доступ к шине так, как если бы передавалось только это единственное сообщение. Сообщения с более низким приоритетом автоматически передаются снова в очередном цикле шины или в последующих циклах, если имеются еще не переданные сообщения с более высоким приоритетом.
В шине используется кодирование сигнала по схеме NRZ с передачей сигнала по двухпроводной витой паре, которая может быть экранированной или неэкранированной. Возможно даже применение обычного телефонного провода и оптического волокна.
Сеть CAN работает в исключительно тяжелых условиях, поэтому в стандарте предусмотрены механизмы нахождения и коррекции ошибок, которые гарантируют обнаружение любой ошибки при передаче данных. Стандарт ISO 11898 “рекомендует”, чтобы конструкция интерфейсных микросхем гарантировала передачу данных при обрыве любого из двух проводов шины, при коротком замыкании одного из проводов на “массу” или замыкании одного из проводов на шину питания.
При обрыве обоих проводов в одной точке возможно продолжение работы образовавшихся подсистем с выполнением ограниченных функций. Степень ограничений зависит от аппаратуры, подключенной к сети, и ее конфигурации.
Стандарт J1850
Стандартом предусматриваются две возможности передачи данных: со скоростью 41,6 кбит/с при применении модуляции PVM и 10,4 кбит/с при модуляции VPW.
Протокол J1850 поддерживает арбитраж CSMA/CR, при котором в сети нет ведущего устройства. Любой узел перед передачей данных “слушает” шину в течение определенного времени. Если шина занята, перед новой попыткой узел ждет, пока передача по шине закончится и шина освободится. Процесс прослушивания шины перед передачей называется Carrier Sence. Так как протокол J1850 одноуровневый, то всем узлам обеспечиватеся равный доступ к шине. Допускается одновременная заявка на шину со стороны нескольких устройств, при этом разрешение конфликтов обеспечивается заданием приоритета сообщений. У активного символа приоритет выше, чем у пассивного. Когда передающий узел передает пассивный символ, но видит активный, он “понимает”, что какой-то другой узел с более высоким приоритетом тоже передает символ. Любой узел, передающий пассивный символ по шине J1850, но обнаруживший активный, прекращает передачу и переключается на прием. “Победивший” узел продолжает передачу, проверяя каждый бит текущего сообщения. Это называется процессом побитного арбитража.
Максимальная длина шины, работающей по протоколу J1850 - 40 м, число узлов - 32.
На рис. 4 показан пример использования в автомобиле сетей различных классов, а на рис. 5 - будущая архитектура автомобильной сети, в которой к шине питания подключаются различные нагрузки, управляемые по коммуникационной шине.
Процессоры в автомобиле
Поскольку автомобильная промышленность - это огромные деньги, то большинство полупроводниковых компаний предлагают для блоков управления свои микропроцессоры и другие приборы. Это Siemens (Infineon), Motorola, Intel, Bosch и целый ряд других. И все же главными игроками на этом рынке являются Siemens и Motorola, которые выпускают микропроцессоры и интегральные схемы для управления двигателем и подвеской, обеспечения пассивной и активной безопасности и др.
Поскольку в отечественных автомобилях применяются интегральные схемы корпорации Siemens, в частности микропроцессоры SAB 80C517A и C509, интересно с ними познакомиться. Микропроцессор C509 - это 8-разрядный КМОП микропроцессор c тактовой частотой 16 МГц, совместимый с микроконтроллерами Intel 80C51/80C52, но в котором имеется дополнительное арифметическое устройство, 15-канальный 10-разрядный аналого-цифровой преобразователь (АЦП), 29-канальное устройство фиксации и сравнения, а также устройство генерации сигналов переменной длительности (PWM).
Дополнительное АЛУ может выполнять деление 32-разрядных целых чисел за 2,25 мкс, а умножение 16-разрядных чисел - за 1,5 мкс. Минимальное время преобразования аналогового входа в цифру - 7 мкс.
Это процессор достаточно старый, и в нем нет встроенной поддержки протоколов CAN и J1850. В 32-разрядном процессоре ТС1775, который идет ему на смену, имеются два контроллера CAN.
Популярность шины CAN подтверждается тем, что по крайней мере 23 компании выпускают интегральные схемы и микропроцессоры с его поддержкой.
* * *
К сожалению, в статье мы коснулись лишь небольшой части обширной темы автомобильной электроники. За кадром остались система навигации, применение радаров для предотвращения столкновений и инфракрасных камер для облегчения езды в ночное время и многое другое. Разговор об этом будет продолжен в следующих номерах еженедельника.
Окончание. Начало см. PC Week/RE, N 33/2000, с. 26.